Surrogate model¶
Often we work with models (which we will call simulators) that are too slow or expensive for the calculations we would like to use them for. One way to deal with this is to make a faster/cheaper version of the simulator, and use that in place of the expensive model. The faster model is called the “surrogate model”. One challenge with using a surrogate model is that it is an imperfect representation of your simulator, and as a result the calculation made with the surrogate can be inaccurate. The degree of inaccuracy can also be hard to estimate, as different regions of the surrogate might have vastly different influence on the calculation (in some regions small error may have a large impact on the calculation, in others regions large errors may have no impact). In order for a surrogate model to be useful in our calculations of the QoI, it needs to be uncertainty aware, and support non-gaussian noise. These are detailed in the following sections.
Uncertainty aware surrogate model¶
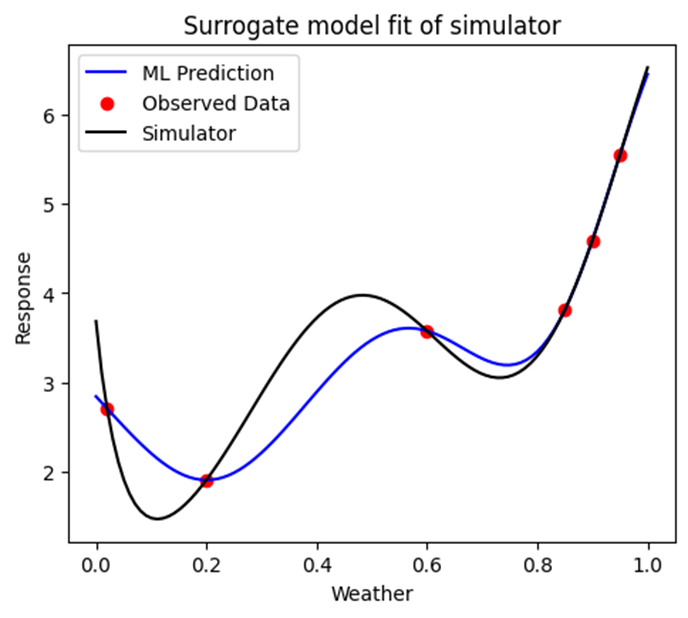
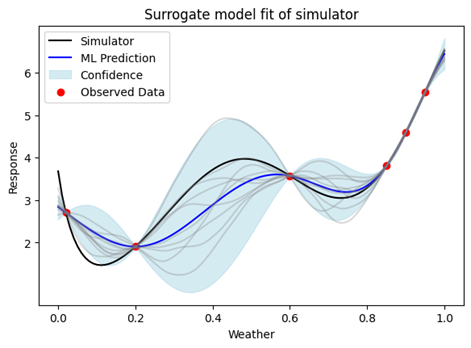
Uncertainty aware surrogate models provide an estimate of the simulator output (as does a regular surrogate), and provides information about the models confidence in the prediction (e.g a confidence interval). If the confidence is well calibrated, we can accurately estimate how wrong our surrogate might be, and see what effect this has on our calculation. In axtreme we use Gaussian Processes (GP) to provide uncertainty aware surrogate models. Some benefits of GPs are that they work well with small amounts of data (meaning we need little data from the expensive simulator), can incorporate prior knowledge about systems (which is not uncommon in engineering). They are also widely used in Bayesian optimisation, which is useful in the later DoE stage.
Surrogate model¶
Uncertainty aware surrogate model¶
Non-Gaussian Noise¶
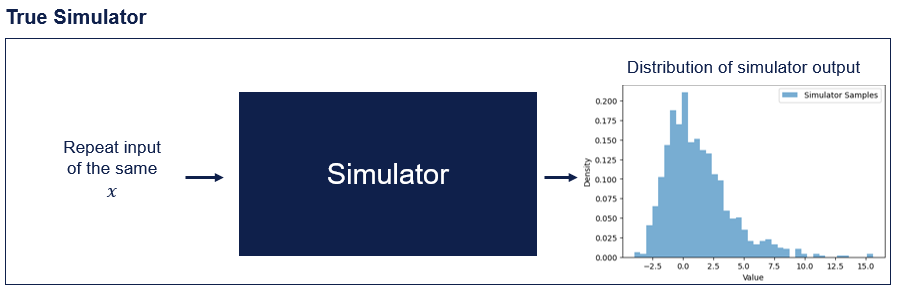
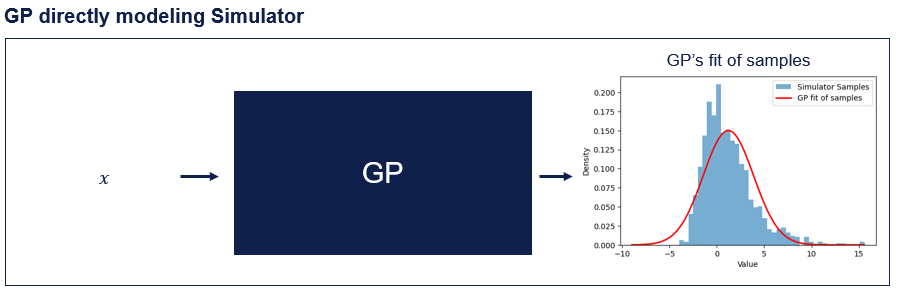
Often simulators are stochastic, meaning for a given input \(x\) the output \(y\) is stochastic (e.g. there is an output distribution at \(x\) and the \(y\)’s are samples of this). The following shows a histogram of the responses seen when running a simulator repeatedly for point \(x\).
GPs estimate Gaussian noise/uncertainty around their predictions (Using other distribution is possible, but becomes intractable). If we use a GP to directly model the output of a simulator, this assumes the output of the simulator is also Gaussian distributed. However, often the simulators do not follow a Gaussian distribution, so taking this approach will produce poorly calibrated confidence estimates.
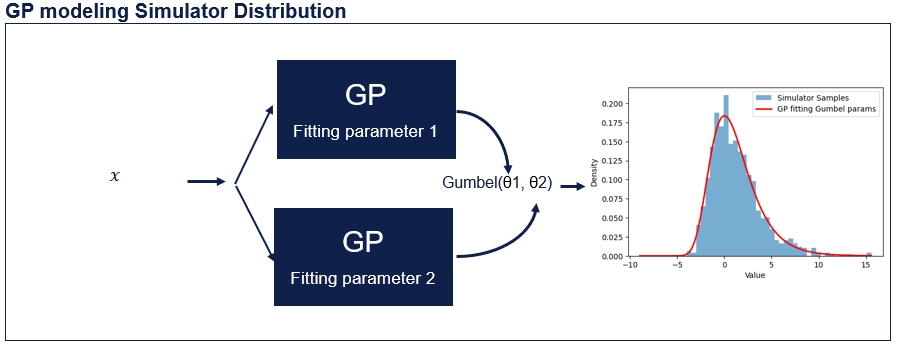
Instead, we can use a number of GPs to model the parameters of the response distribution. Here we need to explicitly select the distribution that we believe best captures the simulators response. The distribution can be chosen based on domain knowledge, or by running the simulator repeatedly at a small number of points to get an understanding of the distribution family.